

The goal of our CoSTAR project is to build an intelligent assistant for small manufacturers, capable of solving problems, recognizing objects, and performing a variety of tasks. To get this actually up and running, we needed to deal with a couple of obstacles though. Here is our setup, with a few robots, but minus the gripper:
First, we set up a Robotiq 3-finger adaptive gripper. The Robotiq gripper is a really nice piece of equipment, capable of a variety of different grasps. Extremely heavy, though; luckily we have two KUKA LBR iiwa 14s, each with a 14 kg payload. We needed to wire up the gripper according to old documents from the Robotiq documentation archive. After all, you can’t let a $10,000 gripper go to waste just because it’s old! Then the problem became actually talking to the gripper.
Now, the KUKA provides power and technically allows communication via its media flange, but we decided to do all our gripper communication over ROS, so we are running power and communication cables down the length of the arm instead. We plugged in the ethercat cable and nothing happened. The ros drivers were silent.
Turns out this was because the pins in the communication cable were bent a little and not in quite right. Before figuring that out, we used the serial port on the 3-finger gripper to talk to the robot. We downloaded the Robotiq user interface and plugged the gripper into a windows laptop.
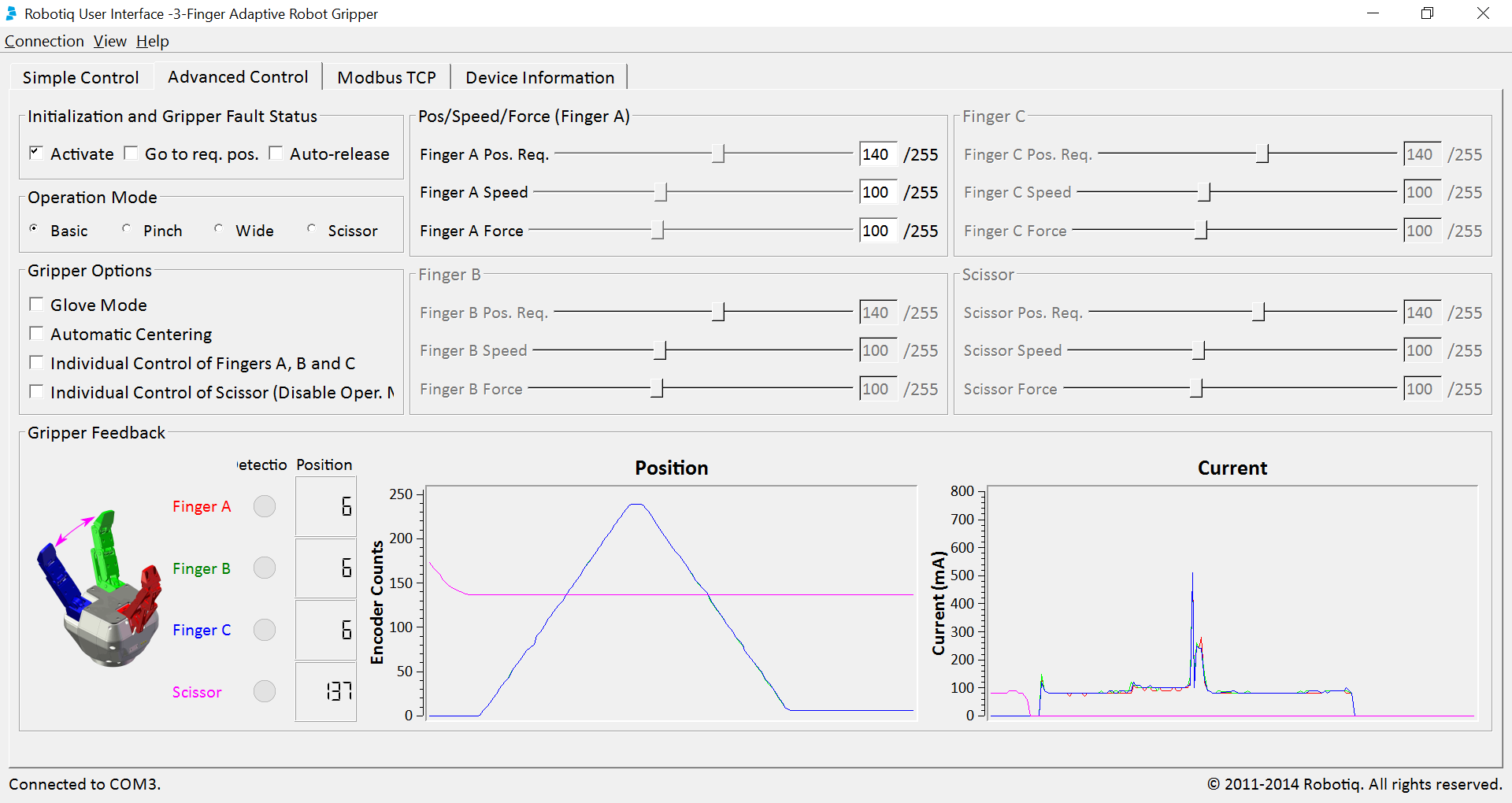
Everything looked great and we were able to control the gripper just fine, so we decided to try connecting to the gripper through ethernet.
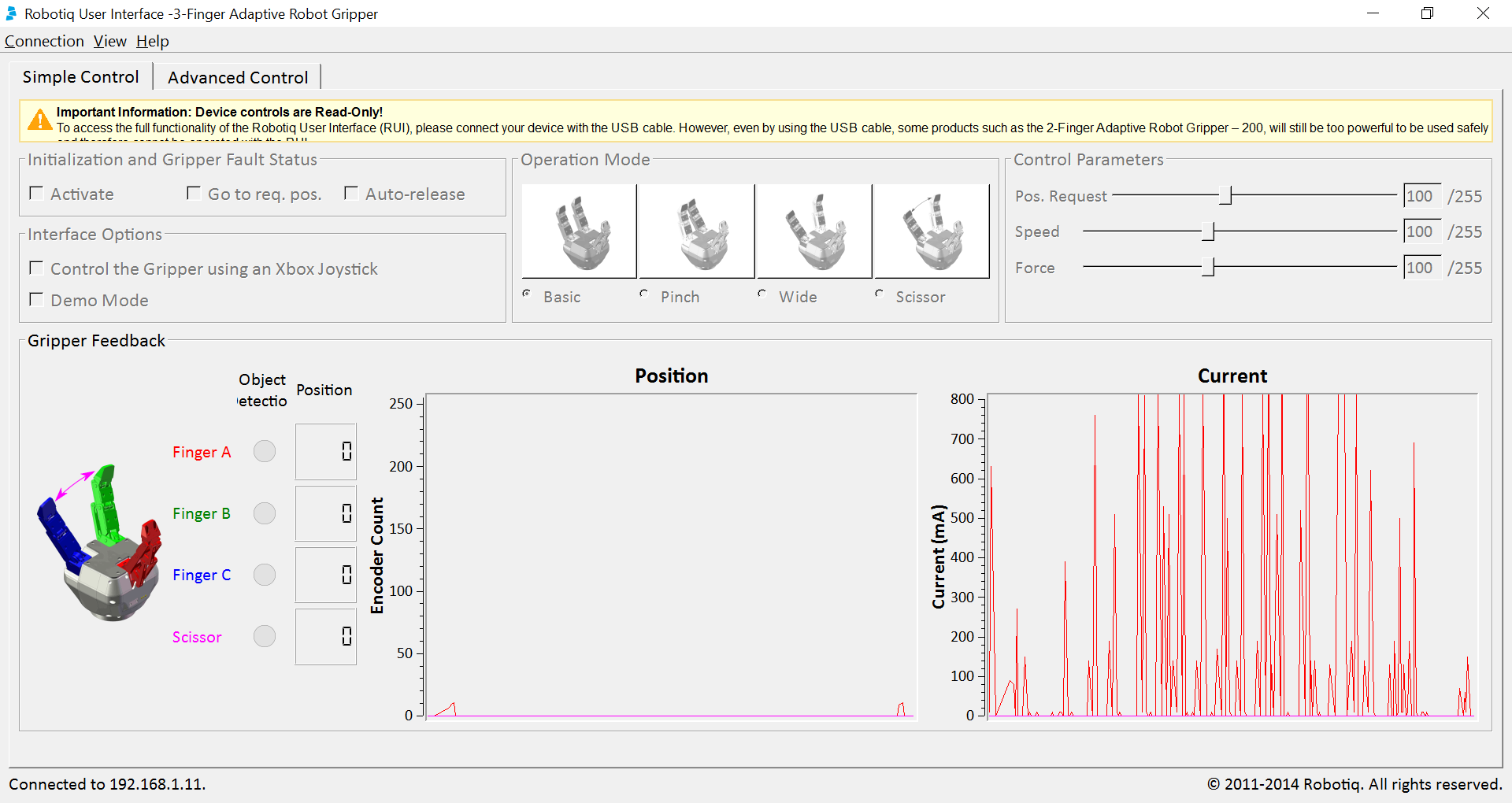
Not so great! What is wrong here? Well, as it turns out, the user interface doesn’t check to make sure you are connecting to the right type of gripper, and we had another robotiq gripper on the network!
Anyway, we found our communication cable issue, fixed it, and were able to get the ROS drivers working pretty easily.